About Me
I am a research assistant at National Taiwan University, specializing in developing sensors and designing control algorithms for robotic applications. I am fortunate to be advised by Prof. Cheng-Wei Chen from the Department of Electrical Engineering at National Taiwan University, working on robot-assisted endodontic treatment. Additionally, I had the opportunity to be mentored by Prof. Giovanni Beltrame from the Department of Computer Science at Polytechnique Montreal during a six-month research internship, where I integrated UWB systems with multi-drone and multi-vehicle networks.
Research Project
DentiBot: First robot designed for endodontic treatment
Collaborated with Yi-Chan Lee, Shoa-Lun Chang and adivised by Prof. Cheng-Wei Chen
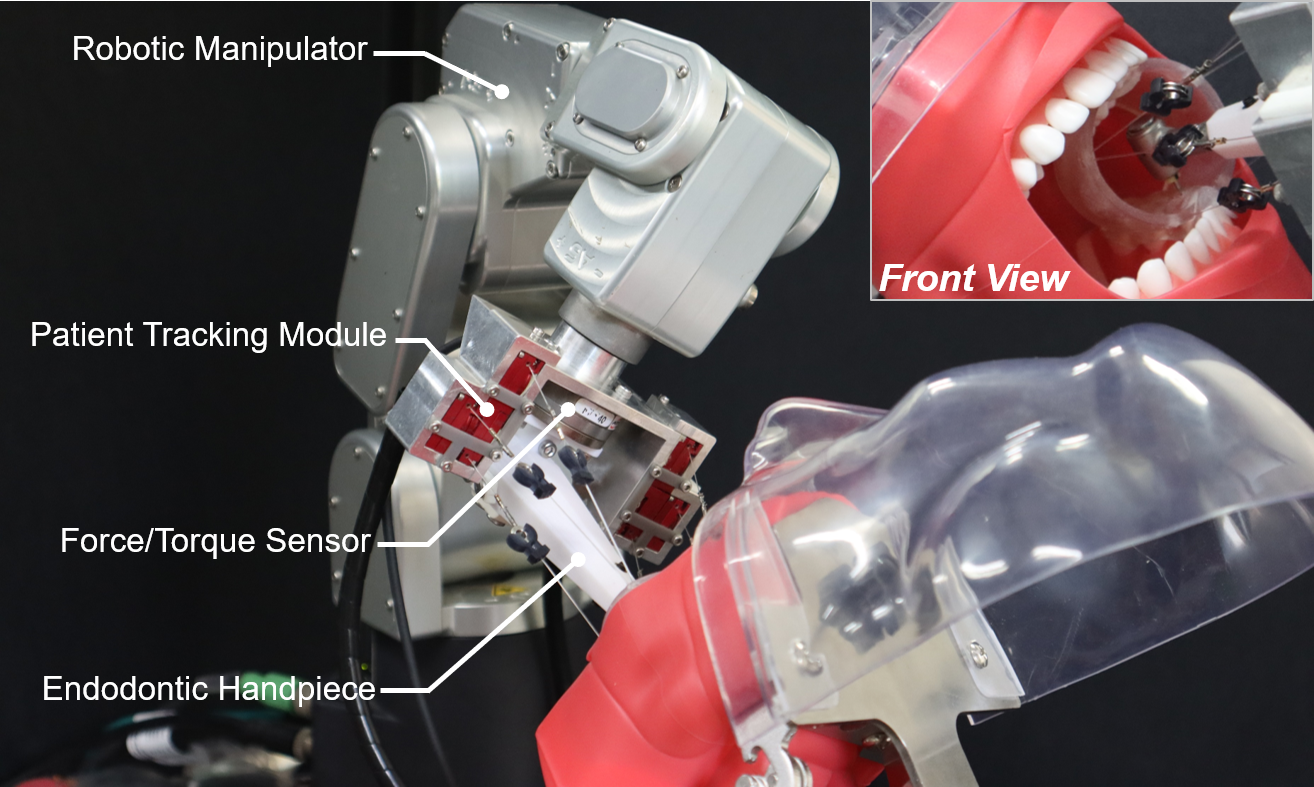
In this project, I integrated DentiBot, the first robot specifically designed for autonomous dental endodontic treatment, focused on cleaning and shaping root canals. DentiBot is equipped with a force and torque sensor, along with a string-based patient tracking module, enabling real-time monitoring of endodontic file contact and patient movement. Additionally, we developed a 6-DoF hybrid position/force controller that autonomously adjusts the surgical path and compensates for patient movement, while also protecting against endodontic file fractures. A file flexibility model is incorporated to account for file bending. Pre-clinical evaluations conducted on acrylic root canal models and resin teeth confirmed the feasibility of DentiBot in supporting endodontic treatment. This work was published in IROS 2022 and submitted to Transactions on Robotics (T-RO).
Relative publications:
Hao-Fang Cheng, Yi-Ching Ho, and Cheng-Wei Chen. "DentiBot: System Design and 6-DoF Hybrid Position/Force Control for Robot-Assisted Endodontic Treatment." arXiv preprint arXiv:2310.09691 (2023). (Submitted to Transactions on Robotics)
Hao-Fang Cheng, Yi-Chan Li, Yi-Ching Ho and Cheng-Wei Chen. "Force-guided alignment and file feedrate control for robot-assisted endodontic treatment." 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022.
Read More
The DentiBot utilizes 6-DoF patient tracking module, which employs a string-based parallel kinematic mechanism as a passive pose measurement device. This mechanism determines the relative pose between two rigid bodies by measuring the lengths of six strings that connect them. The strings are securely attached to a custom-made dental anchor, allowing the PTM to fixate onto the teeth while providing sufficient workspace for the dental handpiece. The anchor points for the strings are strategically distributed to minimize the risk of string crossing and avoid kinematic singularities. A Newton-Raphson method is applied to calculate the relative pose. Notebly, the PTM has demonstrated a precision of 1 mm and 1 degree.

The block diagram below shows the proposed 6-DoF hybrid position/force control. In the inner-loop position control (yellow box), the robotic manipulator receives velocity commands ṗcmd and adjusts its pose relative to the patient to reach the desired value pd. Here, Δp denotes the patient movement, and ps represents the relative pose measured from the PTM. In the outer-loop force control (green box), the contact force 𝜁s between the endodontic file and root canal, measured by the force/torque sensor, is sent to the file flexibility compensator and admittance controller. These components generate the pose adjustments pf and padm to help the DentiBot achieve the desired contact force 𝜁d.

Human-Drone Interaction by using UWB Localization system
Collaborated with Yann Bouteiller, Vivek Shankar Varadharajan and adivised by Prof. Giovanni Beltrame 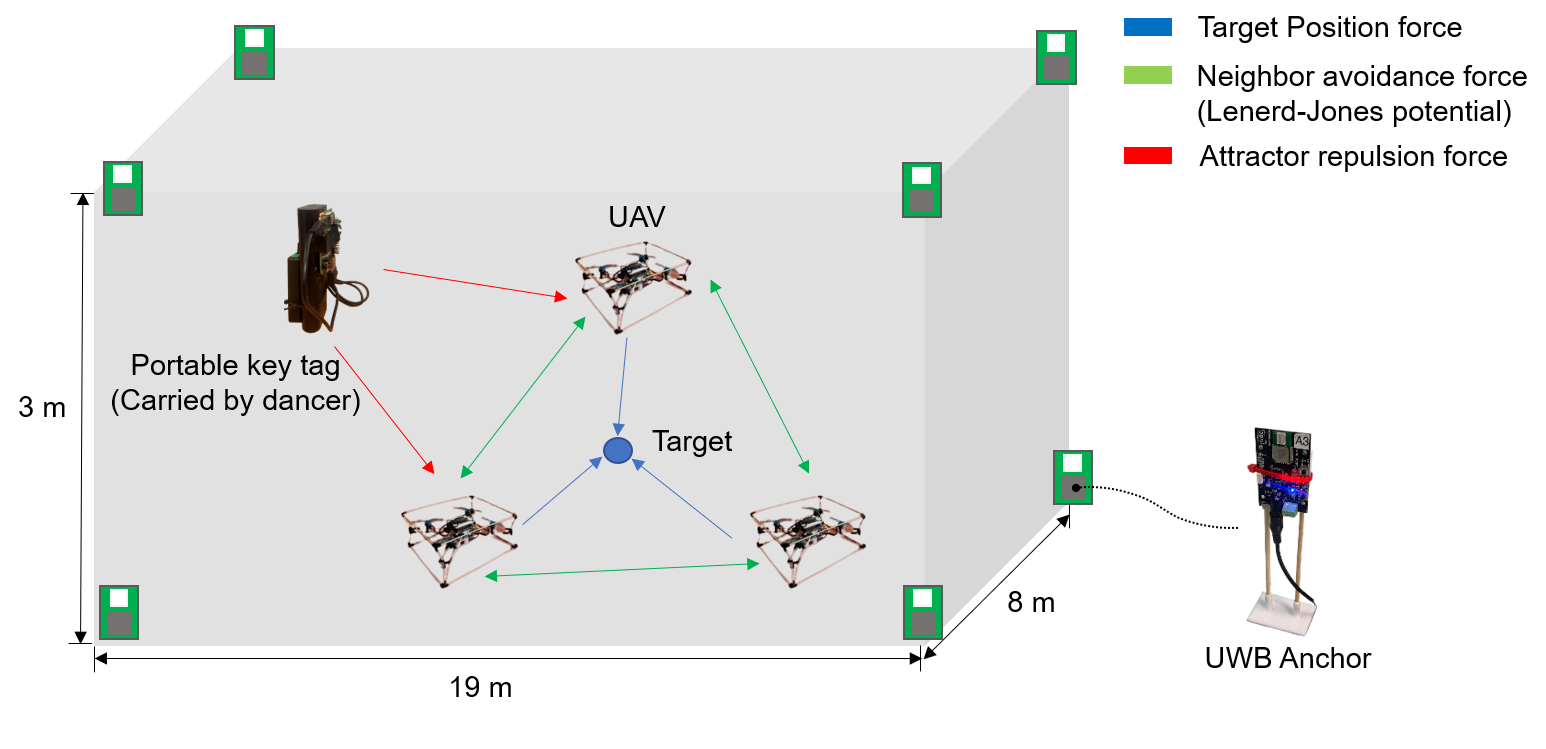
In this project, I deployed six Cogniflies , collision Resilient UAVs, in an exhibition hall to interact with dancers. An Ultra-Wideband (UWB) system was used to localize both the drones and the tags carried by humans, with the advantage of UWB being its ability to penetrate obstacles. I fine-tuned the Extended Kalman Filter (EKF) within the estimator to enhance localization accuracy. Additionally, I integrated the Buzz controller from another project into this work, enabling users to control the drones—such as taking off, swarming, and landing—by moving the tag in their hands.
Enhancing Swarm-SLAM by adding UWB distance constrain
Collaborated with Pierre-Yves Lajoie and adivised by Prof. Giovanni Beltrame 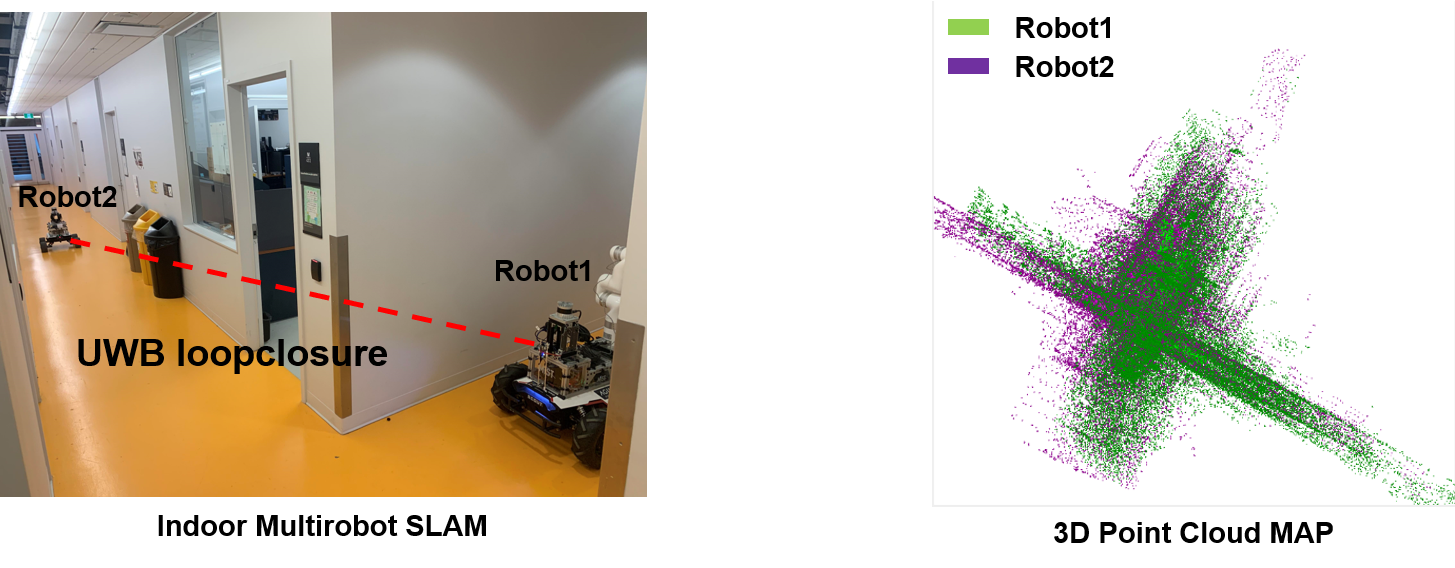
Collaborative Simultaneous Localization and Mapping (C-SLAM) is essential for successful multirobot operations in complex environments. Our lab has already developed Swarm-SLAM for multi-vehicle SLAM. However, merging maps from different robots remains a challenging task, demanding significant computational resources. In this work, I equipped each robot with Ultra-Wideband (UWB) sensors, allowing them to obtain relative distance measurements without line of sight. By integrating this relative distance into the pose graph as an additional constraint, the optimization algorithm for localization is improved, enabling the robots to merge their maps more efficiently and in a shorter time.
Electrical Impedance Sensing System Design for Abnormal Object Detection
Collaborated with Hao-Tse Chen and adivised by Prof. Chun-Yeon Lin 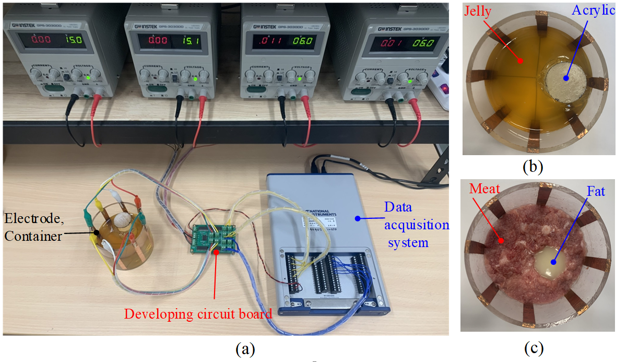
This project proposed a design for an electrical impedance (EI) sensing system. For the part of physical modeling, the harmonic electric fields of the EI sensing system are formulated by the distributed parameter element (DPE) method to calculate the electrode potentials for several injection patterns of different abnormal object distributions, and the computed electrode potentials are feed into a deep neural network (DNN) to estimate the location and size of the abnormal object. For the part of system development, an electric circuit that integrates the multiplexer and Howland pump is utilized to switch the current injection electrodes and control the injection currents. The harmonic electric fields computed by the DPE method are verified by the FEA software, and the effects of utilizing the DNN for abnormal object detection are numerically validated. The proposed design, along with a prototype of the EI sensing system, which is conducted on two kinds of materials, phantom and biological objects, have been experimentally compared.

Competition or Course Project
TDK National Creative Design Competition: Using UAV for autonomous driving, throwing, and landing
Collaborated with Yu-Wen Chen, Kuan-Lun Chen, Li-Kai Chuang ,and adivised by Prof. Wei-Jun Su
In October 2019, I participated in the 2020 TDK National Creative Design Competition as part of a university team, where we achieved 2nd place in the Flying Group category. I led the first team from our university to compete in this event, where we designed and built an autonomous drone from scratch. The drone was capable of following a designated ground trajectory, navigating obstacles, and delivering payloads. As the team leader, I was responsible for organizing the team, delegating tasks, and ensuring resource availability. My leadership and technical efforts were instrumental in guiding the team to a successful outcome, resulting in a fully functional and competitive drone design.
Robotics Course Project: Using Manipualtor to Solve Gigsaw Puzzle
Collaborated with Lily Liu, Yu-Peng Hsieh, Li-Kai Chuang and adivised by Prof. Li-Chen Fu
This project was the final assignment in the 2021 robotics course. Our goal was to enable the robot to autonomously solve a jigsaw puzzle. To achieve this, we integrated a pneumatic sucker into the robotic manipulator for placing the puzzle pieces into the frame. Additionally, we developed an algorithm for matching the puzzle pieces to the template, allowing the robot to position and orient each piece correctly.
Mechatronics Course Project: Velocity Control for Autonomous Panuatic Automobile
Collaborated with Tsu-Yu Chen, Chuang-Hen Liu, Zi-Hao Fu and Li-Kai Chuang
In this project, the assigned task was to build an autonomous pneumatic automobile capable of driving in a straight line at a specific speed. We designed an automobile powered by an electric fan, with a PD controller used to regulate its velocity. Infrared sensor arrays were placed at the front of the car to detect the line on the ground. Notably, our car was able to autonomously drive with acceleration, maintain uniform speed, and decelerate within the required tolerance.